Hoe meet Telraam S2 de snelheid
Telraam S2 kan - net als onze oorspronkelijke sensor, het op Raspberry Pi gebaseerde Telraam V1 - de snelheid niet rechtstreeks meten zoals een typisch politiepistool (een kleine doppler radar), dus moet het een indirecte methode gebruiken om snelheden af te leiden. In een ideale wereld, als we de afstand kennen tussen de camera en elk passerend object, of de lengte van de weg die wordt bestreken door het gezichtsveld van elke afzonderlijke Telraam S2 eenheid, dan zouden we snelheden kunnen berekenen uit gemeten reistijden. De snelheid kan bijvoorbeeld gemakkelijk worden berekend uit de tijd die een auto nodig heeft om een bekende weglengte af te leggen.
Hoewel dit in theorie goed klinkt, is het in de praktijk niet uitvoerbaar om redenen die reeds zijn besproken aan de hand van het voorbeeld van Telraam V1 in
Hoewel dit in theorie goed klinkt, is het in de praktijk niet uitvoerbaar om redenen die reeds zijn besproken aan de hand van het voorbeeld van Telraam V1 in “Snelheidsmeting: onrealistische snelheidsgegevens”.
Om onze metingen afstandsonafhankelijk te maken, blijven we de oplossing gebruiken die we voor Telraam V1 hebben bedacht: Telraam S2 meet de tijd die een auto nodig heeft om zijn eigen lengte af te leggen - die niet afhankelijk is van de afstand van waaruit de auto wordt waargenomen - en in de veronderstelling dat de auto de lengte heeft van een typische auto (een waarde die we hebben berekend op basis van de meest verkochte auto's in de afgelopen jaren in België), kan het zijn snelheid berekenen. Aangezien Telraam S2 een iets andere methode (AI) gebruikt om objecten te vinden dan Telraam V1 (OpenCV) - en om hun lengte te meten - moesten we enkele tests uitvoeren om er zeker van te zijn dat de resultaten nog steeds accuraat waren.
Hoe worden de snelheidsmetingen van Telraam S2 gekalibreerd en gevalideerd?
Het valideren van snelheden is een veel moeilijkere taak dan het valideren van tellingen, omdat het meten van de snelheid van een auto voor een externe waarnemer veel moeilijker is dan het simpelweg opnemen ervan in een voertuigtelling. Aangezien wij geen toegang hebben tot Doppler-radars, hebben wij een testomgeving gecreëerd die de zones voor het meten van de gemiddelde snelheid nabootst die steeds vaker op snelwegen voorkomen. Het principe is het volgende: als we de tijd kunnen meten die auto's nodig hebben om van een bekend punt A naar punt B te rijden, waarbij we de exacte afstand tussen deze twee punten kennen, dan kunnen we uit de verstreken tijd en de afstand de exacte snelheid berekenen, die als de grondwaarheid wordt beschouwd. Als we de auto's tussen punt A en B daadwerkelijk kunnen opnemen en deze video-opname vervolgens naar het Telraam S2 in onze testomgeving kunnen sturen, kunnen we ook de snelheden krijgen die door het Telraam worden gemeten. Door de grondwaarheidssnelheid te vergelijken met de door Telraam S2 gemeten snelheid, kunnen we 1) vergelijken hoe goed deze metingen overeenkomen en 2) een interne correctiefactor berekenen om ze zo goed mogelijk op elkaar af te stemmen.

In onze testopstelling (hierboven getoond) lagen punt A en B 8 meter uit elkaar, wat betekent dat in een 60 FPS-opname een auto met 40 km/u er 43 frames over deed om ertussen te komen (wat neerkomt op een meetnauwkeurigheid van ongeveer 1 km/u). Wij hebben een 3 minuten durende opname van vrij verkeer genomen en de snelheid van elk object gemeten door de tijdstippen te noteren waarop zij de eerste en de laatste lijn, elk met een onderlinge afstand van een meter, passeerden. Er konden lijnen worden getrokken en metingen worden verricht met hoge precisie dankzij de gemeten lengte van de stoeprand langs de rand van het wegdek, die precies één meter was, en de 4K-resolutie en 60 FPS framerate van de video.
In totaal werd de snelheid van 56 auto's op deze manier gemeten, voordat de video door het debuggereedschap werd gehaald. Om een breder snelheidsbereik te bestrijken en de prestaties van Telraam S2 ook bij hogere snelheden te testen, hebben we ook een versnelde versie van de video gemaakt (met tweemaal de oorspronkelijke snelheid), en die ook door de debugging tool gevoerd (uitgaande van tweemaal de oorspronkelijke grondsnelheid voor elk object). Dit proces leverde ons een correctiefactor op die moest worden ingevoerd in de firmware van de AI-chip (met FW-versie 327940), waarna we het volgende snelheidsvalidatiecijfer kregen:
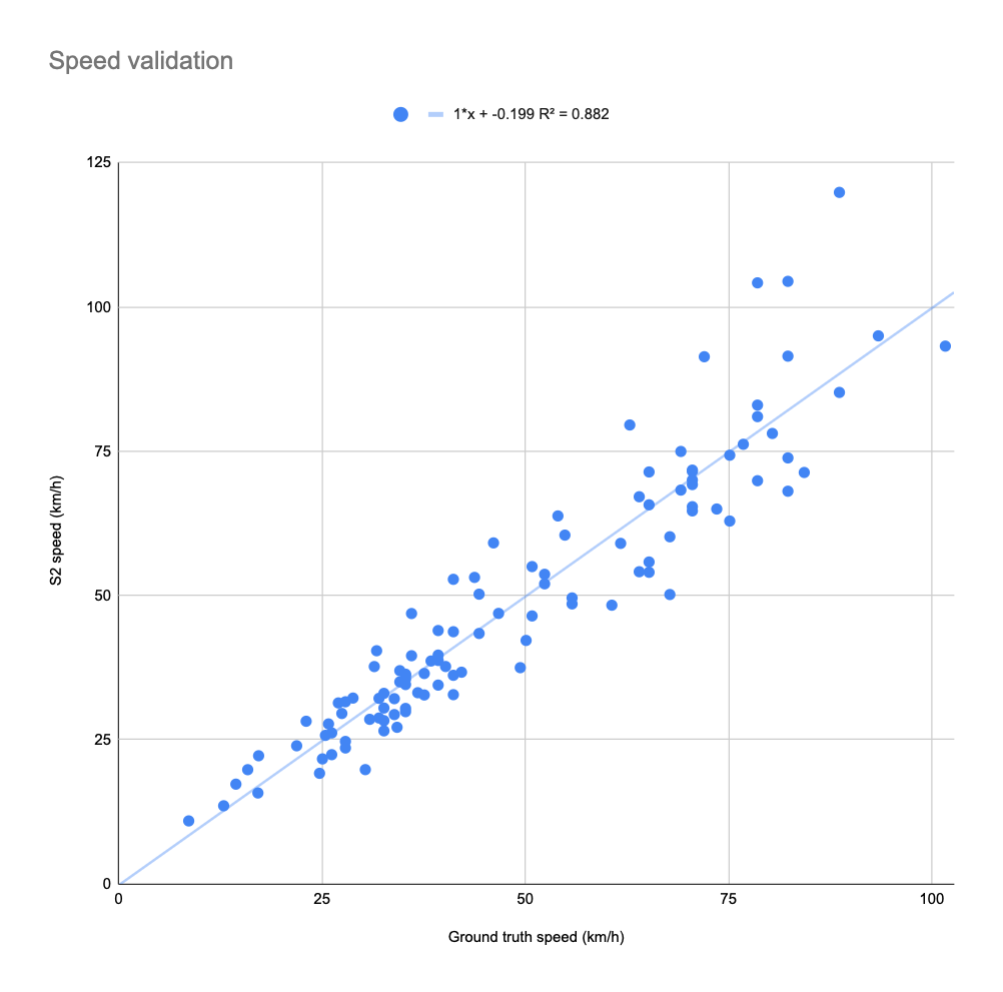
Het is zichtbaar dat de door Telraam S2 gemeten snelheden in het algemeen één-op-één overeenstemmen met de metingen van de grondwaarheid, met enige onvermijdelijke spreiding, die vooral het gevolg is van het feit dat niet alle auto's even lang zijn, en dat de lengte van auto's dichter of verder van Telraam S2 iets anders kan worden gemeten door de AI.
De V85 (85e percentiel snelheid) in de volledige ground truth steekproef is 74,6 km/u, terwijl deze in de Telraam S2 gegevens 71,6 km/u is (96% nauwkeurigheid). Wanneer alleen wordt gekeken naar het oorspronkelijke (niet opgespoorde) monster, is de grondwaarneming V85 40,9 km/u, terwijl de door Telraam S2 gemeten V85 39,6 km/u is, wat 97% nauwkeurig is. Dit is de nauwkeurigheid die we verwachten in stedelijke omstandigheden.
Redenen waarom de snelheidsgegevens van uw Telraam S2 onnauwkeurig kunnen zijn
Er zijn verschillende factoren die de nauwkeurigheid van de snelheidsgegevens beïnvloeden.
De belangrijkste daarvan zijn lokale afwijkingen in de samenstelling van het wagenpark ten opzichte van onze ijksteekproef. Aangezien onze snelheidsafleiding ervan uitgaat dat elke auto de lengte heeft van een typische Belgische auto (of meer bepaald de gemiddelde lengte van de 56 auto's in onze ijksteekproef), zullen snelheden, indien de lokale vloot qua lengte sterk hiervan afwijkt, steeds onnauwkeuriger worden naarmate de afwijking groter wordt. Snelheden zullen worden onderschat op plaatsen waar auto's groter (langer) zijn, en onderschat waar auto's kleiner (korter) zijn.
De tweede factor is het verkeer dat zich ongewoon ver van (of in minder waarschijnlijke gevallen dichtbij) het Telraam S2-apparaat bevindt. Hoewel we geen tests hebben uitgevoerd om deze gevallen te bestuderen, kunnen we op basis van onze kennis van de werking van de AI aannemen dat als auto's erg klein of erg groot lijken in het gezichtsveld van de Telraam S2, de waargenomen lengte van deze objecten voor de AI in zekere mate kan afwijken van wat typisch wordt geacht, en dit zou een vergelijkbaar effect hebben op de snelheidsmetingen als afwijkingen van de werkelijke voertuiggrootte van het typische. Deze risico's kunnen worden beperkt door een correcte selectie van het interessegebied (ROI) en door niet te vertrouwen op snelheidsmetingen van Telraam S2-toestellen die geplaatst zijn langs extreem brede wegen waar de dichtstbijzijnde en de verst verwijderde rijstrook ver uit elkaar liggen (bv. wegen met 3 rijstroken in elke richting).
Aangezien wij ten slotte de V85 moeten berekenen op basis van snelheidsgegevens die zijn ingedeeld in bakken van 5 km/u breed, kunnen de door Telraam opgegeven V85-waarden een afwijking tot 2,5 km/u van de werkelijke V85 vertonen, waarbij de werkelijke afwijking afhangt van het verkeersvolume, de absolute waarde van de V85 en de uniformiteit van de afzonderlijke snelheden.
Telraam S2 zal in vergelijking met Telraam V1 naar verwachting veel minder objecten verkeerd indelen of onechte objecten bevatten, zodat dit geen significante bron van fouten meer zou moeten zijn.